Debugging physics
Collision geometries
To show the collision geometry of a component, the debug mode can be enabled through the context menu of the component you want to debug.
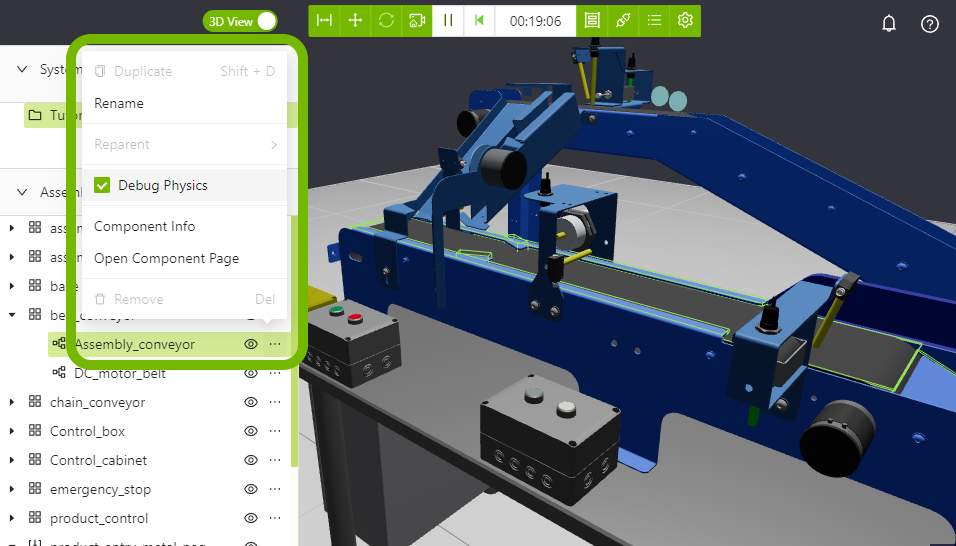
This will display the actual collision geometry that has been generated by the physics engine. The color of the displayed geometry shows the type and state of the physical object.
Dynamic links
Dynamic links have three states. If they stop moving for a while they will start to settle and then sleep, which means that the physics engine can ignore them and use the power to calculate objects that are actually moving.
| Awake | Settling | Sleeping |
|---|---|---|
 |
 |
 |
Tip
The debug functionality can be used in combination with hiding the visual models of the component to only show the collision geometry as in the examples above.
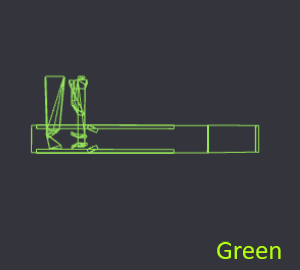
Static links
Static objects will always have a green color. Static links are defined as objects that are not affected by gravity and can not move, but they will still collide with other objects. Take a look at the inertial node in the datamodel for info about how to make objects static.
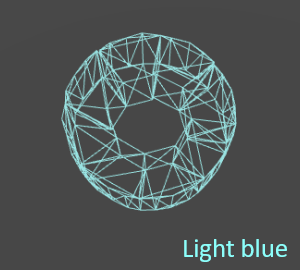
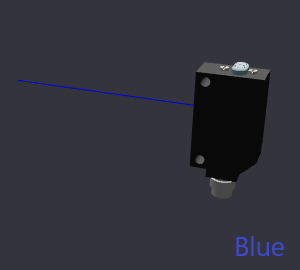
Sensor rays
Sensor rays are displayed as blue lines which show the range of each ray.
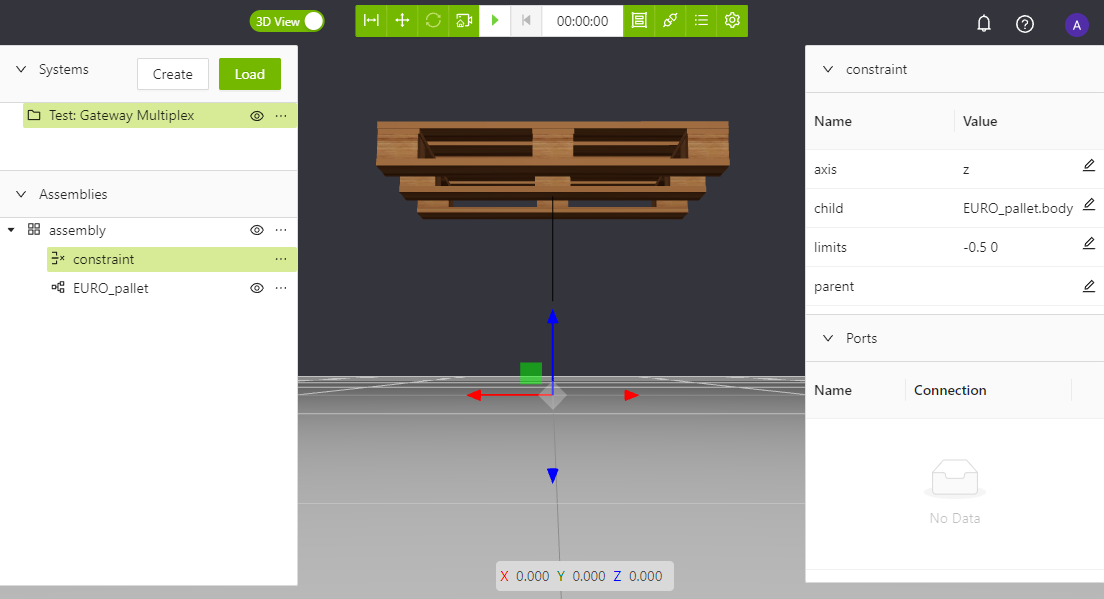
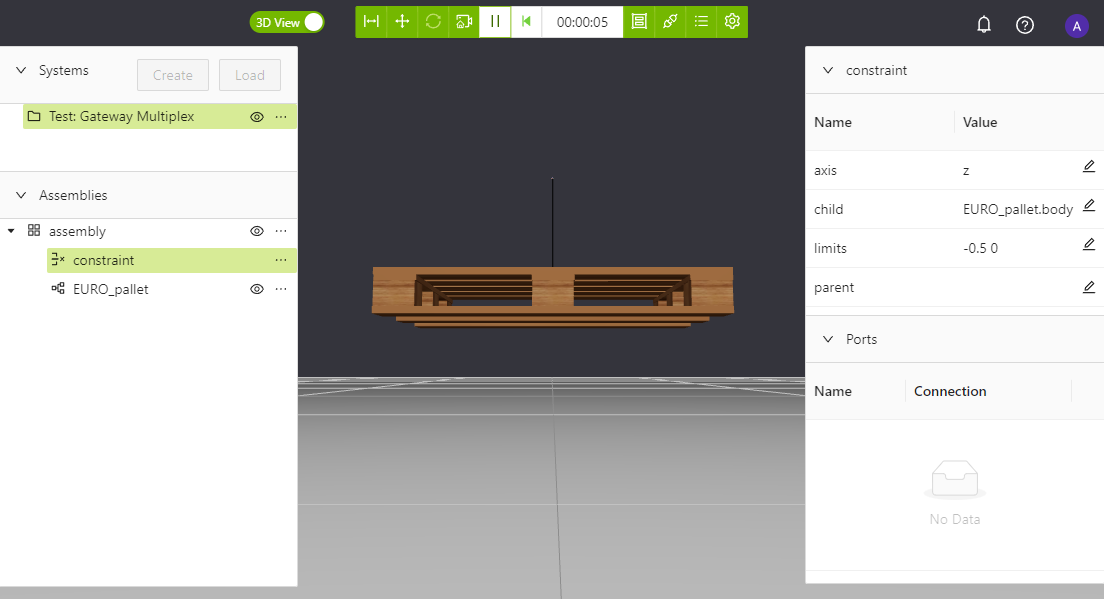
Joints and constraints
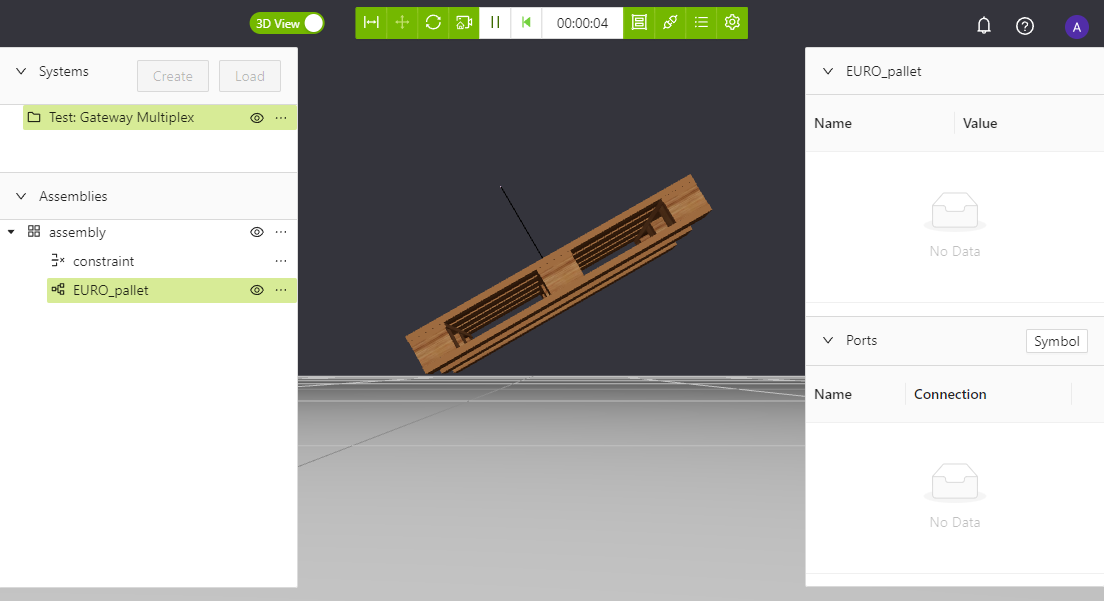
By enabling the switch named Debug constraints in the workspace settings, all joints and constraints in the workspace will be displayed as black lines showing the limits of that constraint. The pallet in the images above has been constrained in the z direction so that it can only move up/down 0.5 m.
| Emulation stopped | Emulation started |
|---|---|
 |
 |
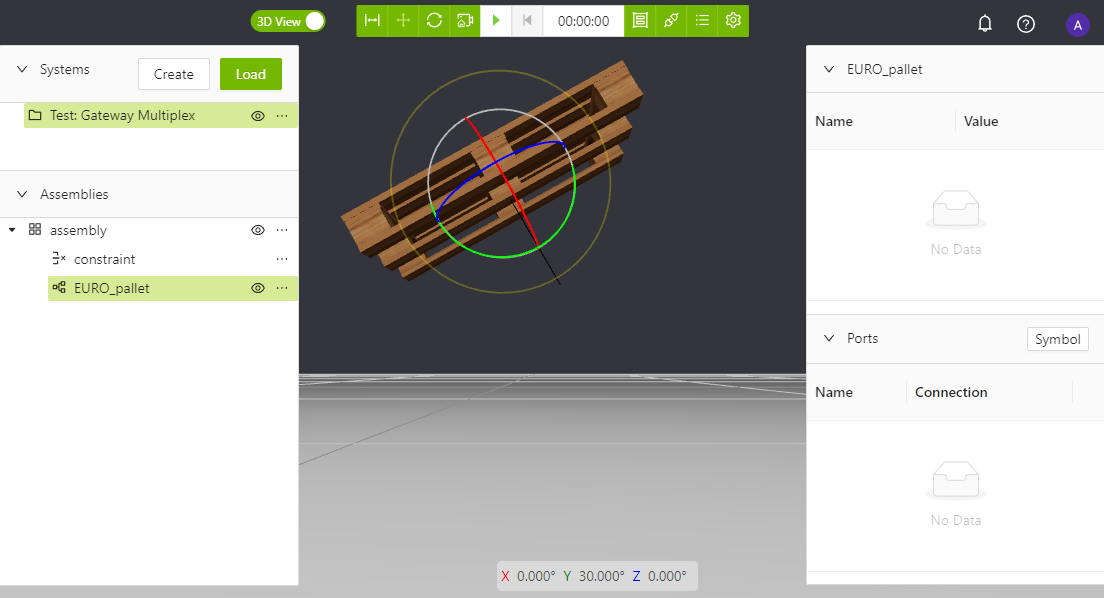
Tip
Constraints are always defined relative to the child, see what happens when we rotate the pallet. Take a look at the page about Constraints for more info about how constraints work.
| Emulation stopped | Emulation started |
|---|---|
 |
 |
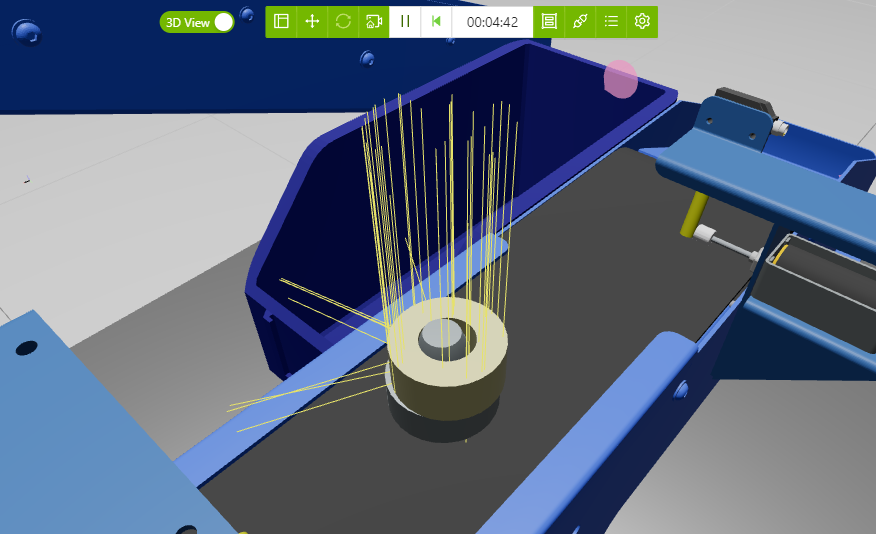
Contact points
Contact points refer to the position and direction of forces that are applied to objects that are colliding. By visualizing the contact points we can see in more detail how the objects interact with each other. For example, we can check if two objects that are supposed to fit together have a big enough margin, like the ring in the image below.